Preface
Sir Isaac Newton (1643--1727) brought to the world the idea of modeling the motion of physical systems with differential equations. However, over the centuries, the most progress in applies in mathematics was made based on developing sophisticated analytical techniques for solving linear systems and their applications. Till the latter portion of the nineteenth century, the normal mathematical techniques are based on an idealized "linearization" of a natural or technological systems that bring the order in our understanding. James Maxwell (1831--1879) was the first who realized that analytical mathematical rules are not always reliable guides to the real world. Carl von Clausewitz (1780--1831), a Prussian general and military theorist, in his book One on War (Chapter 1), emphasized the importance of unpredictability and influence of the initial conditions on outcomes, considering a military action not as a single reaction, but as dynamic interactions between anticipations. Therefore, Clausewitz somehow anticipated today's "chaos theory," but that he perceived and articulated the nature of war as an energy-consuming phenomenon involving competing and interactive factors:
Although our intellect always longs for clarity and certainty, our nature often finds uncertainty fascinating.
Around 1975, after three centuries of study, scientists in large numbers around the world suddenly became aware that there is a special kind of motion that is now now called “chaos”. Chaos is the mathematical theory of dynamical systems that are highly sensitive to initial conditions – a response popularly referred to as the “butterfly effect”. Small differences in initial conditions (such as those due to rounding errors in numerical computation or measurement uncertainty) yield widely diverging outcomes for such dynamical systems, rendering long-term prediction impossible in general. This happens even though these systems are deterministic, meaning that their future behavior is fully determined by their initial conditions,with no random (stochastic) elements involved. The new motion is erratic, but not simply quasiperiodic with a large number of periods, not a kind of equilibrium solution, and not necessarily due to a large number of interacting particles. By the 1960s, there were small groups of mathematicians, particularly in Berkeley (USA), Cambridge (MIT, USA), and in Moscow (Russia), striving to understand this kind of motion that we now call chaos. But only with the advent of personal computers, with screens capable of displaying graphics, have scientists and engineers been able to see that important equations in their own specialties had such solutions, at least for some ranges of parameters that appear in the equations.
Over decades, chaos has been observed in nature (weather and climate, dynamics of satellites in the solar system, time evolution of the magnetic field of celestial bodies, and population growth in ecology) and laboratory (electrical circuits, lasers, chemical reactions, fluid dynamics, mechanical systems, and magneto-mechanical devices). Chaotic behavior has also found numerous applications in electrical and engineering, information and communication technologies, biology and medicine. By now, many chaotic models have been developed and studied in great detail, but they continue to present surprises and raise questions. Recently, the subject of chaos and nonlinear dynamics has received a tremendous amount of attention. However, due to its inherent complexity and intensively numerical nature, it is hard to give a relatively elementary treatment.
Return to computing page for the first course APMA0330
Return to computing page for the second course APMA0340
Return to Mathematica tutorial for the first course APMA0330
Return to Mathematica tutorial for the second course APMA0340
Return to the main page for the first course APMA0330
Return to the main page for the second course APMA0340
Return to Part III of the course APMA0340
Introduction to Linear Algebra with Mathematica
Glossary
All considered systems of differential equations are deterministic because they contain no random, noisy, or stochastic terms. All their solutions are unique and determine a unique flow which is valid for all time. However, some solution graphs and phase plots for system of ordinary differential equations are so irregular that they display very little apparent order and provide no prediction in solution behavior. Therefore, it is a custom to call such systems chaotic. These systems of equations) are not stiff or otherwise difficult to integrate numerically---their chaotic nature does not depend on numerical solvers in use.
Inability of numerical approximations to predict the actual time evolution of a solution stimulates theoretical qualitative analysis of such systems. Non-linear systems of ordinary differential equations (ODEs) are not well understood. Utilizing numerical experiments may be not adequate because they are based only on a finite number of numerical experiments at a finite number of parameter values, each with only finite accuracy. It is always possible that, for some parameter values we have not examined, the behavior is completely different, or that there are strange things going on in some region of phase space that we have not investigated. Such possibilities should be never dismissed. Therefore, numerical experiments should be supplemented with theoretical investigations.
Although chaos is a well-established phenomenon, its strict mathematical definition is still under scrutiny. There are several techniques to find whether any system is chaotic or not. We mention three of them, but only the first one will be used in this tutorial, with ocation demonstrations of the second one.
- Dense filled phase portraits
- Poincaré map or section
- Lyapunov exponents
Examples of Chaotic Equations
Chaotic systems are dynamical systems that appear to be random and disorderly but are actually governed by underlying patterns. These systems are highly influenced by initial conditions since a slight change in initial values can cause a very different outcome, a property which is popularly known as the butterfly effect. We now know a great number of sets of ordinary differential equations derived from an even greater number of real world problems, which have chaotic looking solutions, in some respect or other. The list of chaotic systems can be found on the web.
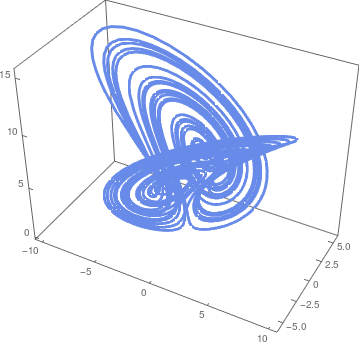
The Rabinovich–Fabrikant system is a set of equations developed by Russian (of Jewish descent) scientists Mikhail Rabinovich and Anatoly Fabrikant in 1979 to model waves in non-equilibrium media. Traditional nonlinear dynamics with relation to physical applications (mainly electronics and radio) was developed by Mandelshtam, Andronov, etc. in around 1930 and it was based on so-called "qualitative theory of differential equations." They gave full and complete analyses of two-dimensional systems and showed that the only attractors in 2D systems were equilibrium states and limit cycles. The higher dimensional systems were mainly "terra incognita" till "strange attractors" were discovered in 3D systems, starting from Lorenz system, which was supposed to describe weather dynamics. It has become clear then, that 3D systems (and weather therefore) may exhibit chaotic behavior, which can't be fully predictable.
Rabinovich and Fabrikant were the first who discovered the practical chaotic system, describing real physical effect (modulational instability), which can be found in multiple physical applications. Unlike to Lorents system that served to mathematically demonstrate chaotic behavior of solutions to 3D systems, the RF model was driven by practical applications. As for possible application of RF strange attractor, imagine, for example, waves in some medium with dispersion (plasma or fluid or any other), where waves exited with a certain frequency. Because of dispersion, they cannot generate harmonics or subharmonics. Instead, when they propagate, they exhibit modulational instability, generating satellite harmonics, which are beyond the excitation range and therefore are subject to dissipation. This may happen, for example, in a resonator, where frequencies are discrete. A classical rubi laser could be a good example of this. That is when a strange attractor may appear given certain parameters.

|
This system is given by a set of three coupled ordinary differential equations as
\begin{equation} \label{EqChaos.1} \begin{split} \dot{x} &= y \left( z-1 + x^2 \right) + \gamma \,x , \\ \dot{y} &= x \left( 3z + 1 - x^2 \right) + \gamma \, y , \\ \dot{z} &= -2z \left( \alpha + xy \right) , \end{split} \end{equation}
where α and γ are constants that control the evolution of the system. For some values of α and γ, the system is chaotic, but for others it is periodic. Bifurcation studies have shown that for α = 1.2, γ = 0.87 we have
a chaotic system and α = 1.5, γ = 0.55 correspond to a non-chaotic system.
|

|
||
| Mikhail Rabinovich | Anatoly Fabrikant |
|
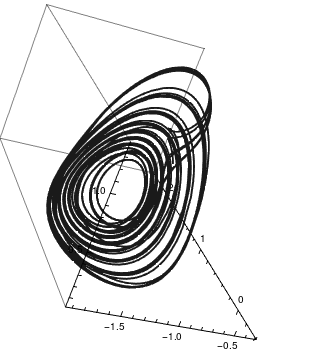
We plot solutions to RF system when α = 1.1 and γ = 0.87 with the initial conditions
\[ x(0) = -1, \quad y(0) = 0, \quad z(0) = 0.5. \]
a = 1.1; gamma = 0.87;
sol = NDSolve[{x'[t] == y[t]*(z[t] - 1 + (x[t])^2) + gamma*x[t], y'[t] == x[t]*(3*z[t] + 1 - (x[t])^2) + gamma*y[t], z'[t] == -2*z[t]*(a + x[t]*y[t]), x[0] == -1, y[0] == 0, z[0] == 0.5}, {x, y, z}, {t, 0, 100}] ParametricPlot3D[Evaluate[{x[t], y[t], z[t]} /. sol], {t, 0, 100}, PlotRange -> All, PlotTheme -> "Monochrome"] |
|
| Rabinovich–Fabrikant system | Mathematica code |
Historical notes: Anatoly Fabrikant was a softmore student at Nizhny-Novgorod Lobachevsky State University (Russia) when he met Michael Rabinovich.
- Agrawal, S.K., Srivastava, M., Das, S., Synchronization between fractional-order Ravinovich--Fabrikant and Lotka--Volterra systems, Nonlinear Dynamics, 2014, Vol. 69, No. 4, pp.2277--2288. doi: 10.1007/s11071-012-0426-y
- Danca, M.-F., Feckan, M., Kuznetsov, N., Chen, G., Looking more closely to the Rabinovich--Fabrikant system, International Journal of Bifurcation and Chaos, 2016, Vol. 26, No. 2, 1650038 (21 pages).
- Danca, M.F., Kuznetsov, N., Chen, G., Unusual dynamics and hidden attractors of the Rabinovich--Fabrikant system, 2016, arXiv:1511.07765
- N.V. Kuznetsov, Hidden attractors in fundamental problems and engineering models.A short survey, AETA 2015: Recent Advances in Electrical Engineering and Related Sciences, Lecture Notes in Electrical Engineering, 371 (2016) 13
- Rabinovich, M.I. and Fabrikant, A.L., Stochastic self-modulation of waves in nonequilibrium media, J.E.T.P. (Sov.) 77 (1979) 617.
The Genesio equation is
|
a = 1.2; b = 2.92; c = 6;
sol = NDSolve[{x'[t] == y[t], y'[t] == z[t], z'[t] + a*z[t] + b*y[t] + c*x[t] - (x[t])^2 == 0, x[0] == 0.2, y[0] == -0.3, z[0] == 1}, {x, y, z}, {t, 0, 200}]; ParametricPlot3D[Evaluate[{x[t], y[t], z[t]} /. sol], {t, 0, 200}, PlotRange -> All, PlotTheme -> "Monochrome"] |
|
| Genesio equation | Mathematica code |
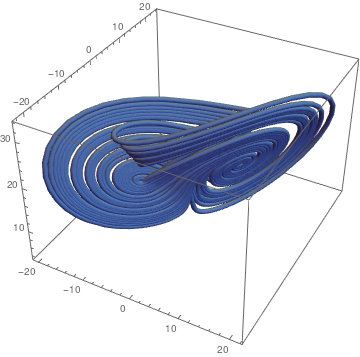
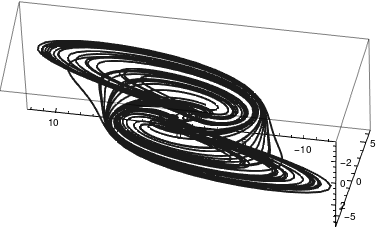
The Chen double scroll attractor is a system of ODEs is models morphogenesis in higher organisms.
|
(* Set the parameters *)
a = 40; b = 3; c = 28; (* Set the differential equation *) F1[x_, y_, z_] := a (y - x) F2[x_, y_, z_] := (c - a) x - x z + c y F3[x_, y_, z_] := x y - b z (* Set the initial conditions *) x0 = -0.1; y0 = 0.5; z0 = -0.6; ta = 2; (* Solve, keeping the final value because we are removing transient behavior and waiting for the solution to converge to the attractor *) ap = NDSolve[{xa'[t] == F1[xa[t], ya[t], za[t]], ya'[t] == F2[xa[t], ya[t], za[t]], za'[t] == F3[xa[t], ya[t], za[t]], xa[0] == x0, ya[0] == y0, za[0] == z0}, {xa, ya, za}, {t, 0, ta},MaxSteps -> Infinity] (* Start a new computation at the place where the last solution ended. *) x1 = xa[ta] /. ap; y1 = ya[ta] /. ap; z1 = za[ta] /. ap; tb = 50; (* Solve again, except this time starting at the place the solution ended the last time *) bp = NDSolve[{xb'[t] == F1[xb[t], yb[t], zb[t]], yb'[t] == F2[xb[t], yb[t], zb[t]], zb'[t] == F3[xb[t], yb[t], zb[t]],xb[0]==x1, yb[0]==y1, zb[0]==z1},{xb, yb, zb}, {t, 0, tb}, MaxSteps -> Infinity] (* Plot the attractor for viewing on screen *) ParametricPlot3D[{xb[t], yb[t], zb[t]} /. bp,{t, 0, tb}, PlotRange -> All] (* Plot again in 3D *) cp = ParametricPlot3D[{xb[t], yb[t], zb[t]} /. bp,{t, 0, tb}, PlotStyle -> Tube[.5], PlotPoints -> 100, PlotRange -> All] |
|
| Chen double scroll. | Mathematica code |
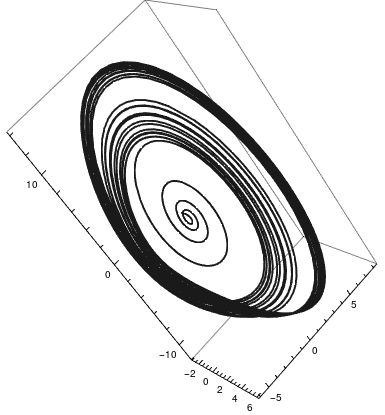
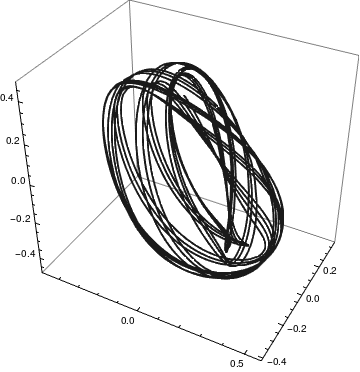
The Langford attractor appear in three dimensional (3D) systems of ODEs.
|
We use the following numerical values
\[ a=0.95, \quad b = 0.7, \quad c = 0.6, \quad d=3.5, \quad e= 0.25, \]
and initial conditions:
\[ x_0 = 0.1, \quad y_0 =1, \quad z_0 = 0. \]
F1[x_, y_, z_] := x (z - 0.7) - 3.5*y;
F2[x_, y_, z_] := 3.5*x + (z - 0.7)*y; F3[x_, y_, z_] := 0.6 + 0.95*z - z^3 /3 - (x^2 + y^2)*(1 + 0.25*z) + 0.1*z*x^3; ap = NDSolve[{xa'[t] == F1[xa[t], ya[t], za[t]], ya'[t] == F2[xa[t], ya[t], za[t]], za'[t] == F3[xa[t], ya[t], za[t]], xa[0] == x0, ya[0] == y0, za[0] == z0}, {x, y, z}, {t, 0, 50}, MaxSteps -> Infinity] ParametricPlot3D[Evaluate[{x[t], y[t], z[t]} /. ap], {t, 0, 50}, PlotRange -> All] |
|
| Langford attractor. | Mathematica code |
The Rucklidge attractor appear in three dimensional (3D) systems of ODEs.
|
We use the following numerical values
\[ \kappa = -2, \quad \lambda = -6.7 \]
and initial conditions:
\[ x_0 = 1, \quad y_0 = 0, \quad z_0 = 4.5 . \]
solution = NDSolve[{x'[t] == -2*x[t] + 6.7*y[t] - y[t]*z[t], y'[t] == x[t], z'[t] == -z[t] + (y[t])^2, x[0] == 1, y[0] == 0, z[0] == 4.5}, {x, y, z}, {t, 0, 150}]
ParametricPlot3D[Evaluate[{x[t], y[t], z[t]} /. ap], {t, 0, 150}, PlotRange -> All < PlotTheme -> "Business"] |
|
| Rucklidge attractor. | Mathematica code |
The Arneodo attractor is
|
a = -5.5; b = 3.5; c = 1;
sol = NDSolve[{x'[t] == y[t], y'[t] == z[t], z'[t] + a*x[t] + b*y[t] + z[t] + (x[t])^3 == 0, x[0] == 0.2, y[0] == 0.2, z[0] == -0.75}, {x, y, z}, {t, 0, 200}]; ParametricPlot3D[Evaluate[{x[t], y[t], z[t]} /. sol], {t, 0, 200}, PlotRange -> All, PlotTheme -> "Monochrome"] |
|
| Arneodo attractor | Mathematica code |
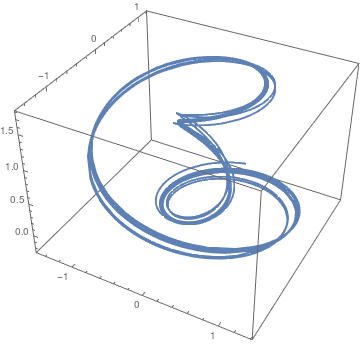
The Hénon-Heiles invariant torus models the motion of individual stars as affected by the rest of a galaxy. Unlike the other models, this is a four-dimensional example. We project and only plot(𝑥,𝑦,𝑧). The system is Hamiltonian, so the chaotic solutions are not strange attractor.
|
solution = NDSolve[{x'[t] == z[t], y'[t] == w[t], z'[t] == -x[t] - 2*x[t]*y[t], w'[t] == -y[t] - (x[t])^2 + (y[t])^2, x[0] == 0, y[0] == 0, z[0] == 0.35, w[0] == -0.3}, {x, y, z, w}, {t, 0, 200}]
ParametricPlot3D[ Evaluate[{x[t], y[t], z[t]} /. solution], {t, 0, 150}, PlotRange -> All, PlotTheme -> "Monochrome"] |
|
| Hénon-Heiles invariant torus. | Mathematica code |
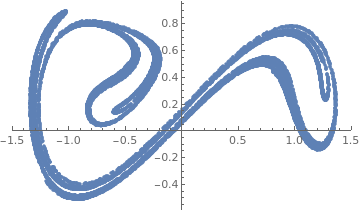
Poincaré Map
A dynamical system is any system that allows one to determine (at least theoretically) the future states of the system provided the present value. In this tutorial, we consider dynamical systems that are generated by differential equations.
In dynamical systems, a first recurrence map or Poincaré map, named after Henri Poincaré (1854--1912), is the intersection of a periodic orbit in the state space of a continuous dynamical system with a certain lower-dimensional subspace, called the Poincaré section, transversal to the flow of the system or stroboscopic section. More precisely, one considers a periodic orbit with initial conditions within a section of the space, which leaves that section afterwards, and observes the point at which this orbit first returns to the section. One then creates a map to send the first point to the second, hence the name first recurrence map. The transversality of the Poincaré section means that periodic orbits starting on the subspace flow through it and not parallel to it.
A Poincaré map can be interpreted as a discrete dynamical system with a state space that is one dimension smaller than the original continuous dynamical system. Because it preserves many properties of periodic and quasiperiodic orbits of the original system and has a lower-dimensional state space, it is often used for analyzing the original system in a simpler way. In practice this is not always possible as there is no general method to construct a Poincaré map.
|
Consider the Duffing equation subject to the homogeneous initial conditions: \[ \ddot{x}(t) + a\,\dot{x}(t) -x(t) + x^3 (t) = b\,\cos t, \qquad x(0) =0 , \quad
\dot{x} (0) = 0. \]
data = Block[{a = 0.21, b = 0.31}, Reap[NDSolve[{x''[t] + a*x'[t] - x[t] + x[t]^3 == b*Cos[t], x[0] == 0, x'[0] == 0, WhenEvent[Mod[t, 2*Pi] == 0, Sow[{x[t], x'[t]}]]}, {}, {t, 0, 100000}, MaxSteps -> Infinity]]][[-1, 1]];
ListPlot[data, PlotRange->{{-1.5,1.5},All}, PlotStyle->PointSize[0.01]] |
|
| Poincaré section for the Duffing equation. | Mathematica code |
- Alligood, K.T., Sauer, T.D., and Yorke, J.A., Chaos. An Introduction to Dynamical Systems, 1996, Springer-Verlag, New York, QA614.8.A44 1996
- Baker, G.L. and Gollub, J.P., Chaotic Dynamics: An Introduction, Cambridge University Press, Cambridge, 1990 and a996. ISBN 0521476852
- Bourke, Paul. “The Rossler Attractor in 3D.” [Online] Available: http://astronomy.swin.edu.au/~pbourke/fractals/rossler/, May 1997.
- Cardin, P.T., Libre, J., Transcritical nd zero-Hopf bifurcation in the Genesio system, Preprint.
- Chan Man Fong, C.F. and De Kee, D., Perturbation Methods, Instability, Catastrophe and Chaos, 1999, World Scientific Pub Co Inc.
- Chen, G. and Ueta, T., Yet another chaotic attractor, International Journal of Bifurcation and Chaos, 1999, Vol. 09, No. 07, pp. 1465--1466. https://doi.org/10.1142/S0218127499001024
- Danca, M.F. and Chen, G., International Journal of Bifurcation and Chaos, 2004, 14(10), pp. 3409–3447.
- Gleick, J., Chaos: Making a New Science, 2008, Penguin Books; Anniversary, Reprint edition.
- Gupta, A., Chaos and strange attractors, 2004.
- Hilborn, R.C., Chaos and Nonlinear Dynamics: An Introduction for Sientists and Engineers. Oxford University Press, 1994.
- Hirsch, M.W., Smale, S., Devaney, R.L., Differential Equations, Dynamical Systems, and an Introduction to Chaos, 2012, Academic Press; 3rd Edition.
- Holmgren, R.A., A First Course in Discrete Dynamical Systems. Springer-Verlag, New York, 1996.
- Korsch, H.J. and Jodi, H.-J., Chaos: A Program Collection for the PC, 2007, Springer-Verlag, Berlin, ISBN 978-3-662-03866-6; doi: 10.1007/978-3-662-03866-6
- Kolebaje, O.T., Ojo, O.L., Akinyemi, P., and Adenodi, R.A., On the application of the multistage Laplace Adomian decomposition method with pade approximation to the Rabinovich--Fabrikant system, Advances in Applied Science Research, 2013, 4(3):232-243
- Kuznetsov, N. and Reitmann, V., Attractor Dimension Estimates for Dynamical Systems: Theory and Computation. 2020, Cham: Springer International Publishing, doi: 10.1007/978-3-030-50987-3
- Lucas, S.K., Sander, E., and Taalman, L., Modeling Dynamical Systems for 3D Printing,
- Lynch, S., Dynamical Systems with Applications Using Mathematica, 2017, Birkhäuser; 2nd ed.
- Moon, Von F.C., Chaotic Vibrations, John Wiley & Sons, New York, 1987. https://doi.org/10.1002/piuz.19880190308
- Moore, John. “The Strange Attractors.” [Online] Available: http://www.bath.ac.uk/~ma1jdm/strange.html, November 20, 2004.
- Morris, Sid. “Strange Attractors.” [Online] Available: http://www.allrite.com.au/science/science/sa4.htm, October 1996.
- Ott, E., Chaos in Dynamical Systems, Cambridge University Press; 2nd Edition, 2002,
- Poincaré, H., “Sur le probléme des trois corps et les équations de la dynamique,” Acta Math. 13, 1–270 (1890).
- Rand, James. “The Henon Attractor.” [Online] Available: http://library.thinkquest.org/3703/pages/henon.html?tqskip1=1, November 20, 2004.
- Romano, A. and Marasco, A., Classical Mechanics with Mathematica, (Modeling and Simulation in Science, Engineering and Technology), Second edition, 2018, Birkhäuser;
- Seydel, R., From Equilibrium to Chaos: Practical Bifurcation and Stability Analysis, Elsevier, 1988.
- Strogatz, S.H., Nonlinear Dynamics and Chaos, 2015, Westview Press; 2 edition.
- Zhang, H., Liu, D., and Wang, Z., Controlling Chaos: Suppression, Synchronization and Chaotification, 2009, Springer-Verlag, London, ISBN: 978-1-84882-523-9; doi: 10.1007/978-1-84882-523-9
Return to Mathematica page
Return to the main page (APMA0340)
Return to the Part 1 Matrix Algebra
Return to the Part 2 Linear Systems of Ordinary Differential Equations
Return to the Part 3 Non-linear Systems of Ordinary Differential Equations
Return to the Part 4 Numerical
Methods
Return to the Part 5 Fourier Series
Return to the Part 6 Partial Differential Equations
Return to the Part 7 Special Functions