Return to computing page for the first course APMA0330
Return to computing page for the second course APMA0340
Return to Mathematica tutorial for the second course APMA0340
Return to the main page for the course APMA0330
Return to the main page for the course APMA0340
Return to Part II of the course APMA0330
Two lines \( \ell_1 \quad\mbox{and}\quad \ell_2 , \) with slopes m1 and m2, respectively, are orthogonal or perpendicular if their slopes satisfy the relationship \( m_1 m_2 =-1 . \) Two curves are orthogonal or perpendicular at a point if their respective tangent lines to the curves at that point are perpendicular.
The word orthogonal comes from the Greek ορθη (right) and γωνια (angle); the word trajectory comes from the Latin trajectus (cut across). Therefore, a curve that cuts across certain others at right angles is called an orthogonal trajectory of those others.
Now we extend this definition to the family of curves that form the general solution of the differential equation. Suppose that the differential equation \( y' = f(x,y) \) has the family of solutions in implicit form \( F(x,y) = C , \) where C is an arbitrary constant. We refer to the set of curves on the plane as the family of orthogonal trajectories is they form the general solution to the differential equation \( y' = - 1/f(x,y) . \) For example, a family of exponential curves bx and b-x/(lnb)² are orthogonal.
Example: :
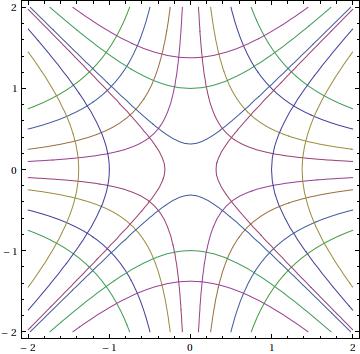
Suppose that we are given the family of curves x*y=c, where c is a constant. These are hyperbolas in quadrants 1 and 3 for c>0 or quadrants 2 and 4 for c<0,
having the axes as asymptotes. They are rectangular hyperbolas
because their asymptotes are perpendicular. The differential equation of the family is
\[
x y' + y =0, \qquad\mbox{or}\qquad \frac{{\text d}y}{{\text d}x} = - \frac{y}{x} .
\]
The orthogonality
condition says that the equation of the orthogonal curves should be \( -{\text d}x/{\text d}y = -y/x \) or \( -{\text d}y/{\text d}x = y/x . \) The latter has the general solution (after separation of variables):
\(y^2 = x^2 +c. \) Now we plot these
curves.
a := ContourPlot[{x y == 1, x y == 0.2, x y == 0.5, x y == 1.5,
x y == -1, x y == -0.2, x y == -0.5, x y == -1.5}, {x, -2, 2}, {y, -2, 2}]
Example: :
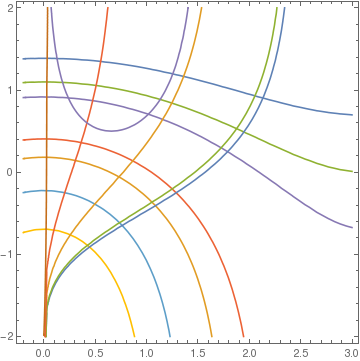
The separable differential equation \( e^y \,{\text d}y = \sin x\,{\text d}x \) defines its
family of solutions: \( e^y = \cos x + c . \)
The orthogonal trajectories to it are obtained by solving the differential equation
Integration yields the general solution
\( \ln \left\vert \tan \frac{x}{2} \right\vert + e^{-y} = c , \) which is a family (depending on parameter c) of orthogonal trajectories to the general solution of \( e^y \,{\text d}y = \sin x\,{\text d}x . \)
Consider a curve whose equation is expressed in polar coordinates (r,θ). In calculus it is shown that the angle ψ, measured positive in the counterclockwise direction from the radius vector to the tangent line at a point, is given by
If two curves are orthogonal at some point having angles ψ1 and
ψ2, then ψ2 = ψ1 + π/2. So
\( \tan\psi_2 = - \cot\psi_1 = -1/\tan\psi_1 . \) Hence, if two curves are to cut one another at right angles, then at the point of intersection the value of the product
\( \displaystyle r\,\frac{{\text d}\theta}{{\text d}r} \) for one curve must be the negative reciprocal of the value of that product for the other curve.
When polar coordinates are used, suppose a family of curves forms the general solution to the differential equation \( P(r,\theta )\,{\text d}r + Q(r,\theta )\,{\text d}\theta = 0 . \) Then
\( \displaystyle r\,\frac{{\text d}\theta}{{\text d}r} = - \frac{r\,P}{Q} . \) Hence, the family of the orthogonal trajectories of the solutions must be solutions of the equations
Example:
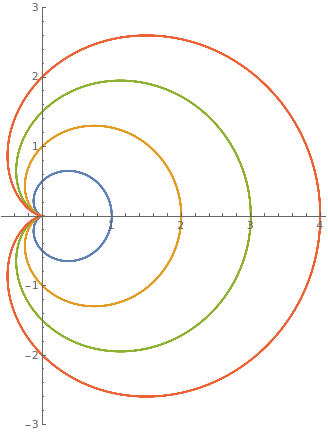
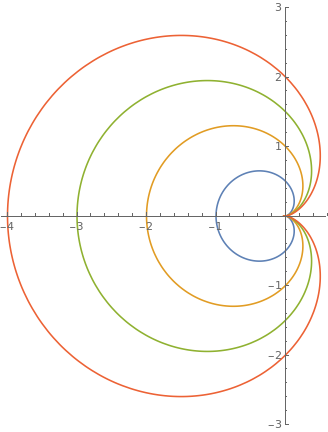
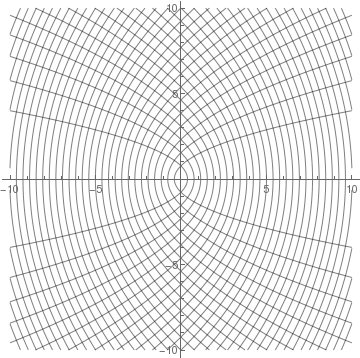
Let us find the orthogonal trajectories of the family of cardioids
\( r = a \left( 1 + \cos\theta \right) . \) We plot a few curves with Mathematica
If we are given a family of curves that satisfies the differential equation \( y' = f(x,y) \) and we want to find a family of curves that intersects this family at a constantt angle θ, we have to solve the differential equation
Example: :
Consider a family of circles \( x^2 + y^2 = r^2 \) of radius r centered at the origin. Upon implicit differentiation of the circle equation, we obtain
Suppose we want to find a family of curves that intersects the given family of circles at an angle of π/4. Since tanπ/4 = 1, we get the equation for these trajectories
Now we consider a similar problem of finding a family of curves that intersects the family of circles at an angle of π/6. In this case, this family of curves will constitute the general solution to the differential equation
Example: :
Let T(x,y) represent the temperature at the point (x,y). The curves given by T(x,y) = c (where c is a constant) are called isotherms. The orthogonal trajectories are curves along which heat will flow. Given the curves of heat flow \( y^2 -2xc = c^2 , \) we find the isotherms.
We choose one of these values, for instance the first one, to define the differential equation.
imder = Solve[step2, Dt[y]]/.eval[[1]]
{{Dt[y] -> (-x - Sqrt[x^2 + y^2])/y}}
Then we must solve the differential equation \( \displaystyle \frac{{\text d}y}{{\text d}x} = \frac{y}{x+ \sqrt{x^2 + y^2}} \) to obtain the orthoronal tranjectories.
Return to the main page (APMA0330)
Return to the Part 1 (Plotting)
Return to the Part 2 (First Order ODEs)
Return to the Part 3 (Numerical Methods)
Return to the Part 4 (Second and Higher Order ODEs)
Return to the Part 5 (Series and Recurrences)
Return to the Part 6 (Laplace Transform)
Return to the Part 7 (Boundary Value
Problems)