This section discusses a completely different strategy to solve an
initial value problem for a single first-order differential equation
\( y' = f(x,y) , \quad y(x_0 )= y_0 . \)
In order to calculate an approximate value of the solution
φ(tn+1) at the next mesh point
t = tn+1, the values of the calculated
solution at some previous mesh points are used. The numerical methods
that use information at more than the last mesh point are referred to as
multistep methods. This section presents two types of multistep
methods: Adams methods and backward differentiation methods. Different levels
of accuracy can be achieved with each type of methods.
Return to computing page for the first course APMA0330
Return to computing page for the second course APMA0340
Return to Mathematica tutorial for the second course APMA0340
Return to the main page for the course APMA0330
Return to the main page for the course APMA0340
Return to Part III of the course APMA0330
Recently, there has been great development of new powerful methods capable of handling linear and nonlinear equations. Among them, there are known the Adomian decomposition method (ADM), the variational iteration method, and the homotopy perturbation method.
The variational iteration method (VIM, for short) was developed by
Ji-Huan He in 1999--2007. This method is preferable over numerical methods
as it is free from rounding off errors as it does not involve
discretization and does not require large computer power
or memory. The VIM gives rapidly convergent successive
approximations of the exact solution if such a solution
exists; otherwise, a few approximations can be used for
numerical purposes. Unlike the ADM, where computational algorithms are normally used to deal with nonlinear terms, the VIM does not require the utilization of restrictive assumptions because it approaches linear and nonlinear problems directly in a like manner. Many researches in variety of
scientific fields applied this method and showed the VIM has many merits and to be reliable for a variety of
scientific application. In particular, Abassy et al., proposed the modified variational iteration method (MVIM) to avoid repeated computation of
redundant terms.
To illustrate the basic concept of the He’s VIM, consider
the following general nonlinear equation:
where \( L = \texttt{D} = {\text d}/{\text d}x \) is the linear differential operator (which in general can include other terms), N is the nonlinear operator, and g is the input (known) function. He has
modified the general Lagrange multiplier method to an
iteration method called as correction functional. The basic
character of the method is to construct a correction
functional for the aforementioned equation, which reads as
\[
y_{n+1} (x) = y_n (x) + \int_0^x \lambda (s) \left\{ L\left[ y_n (s) \right] - N\left[ \tilde{y}_n (s) \right] - g(s) \right\} {\text d}s ,
\]
where λ is a Lagrange multiplier. The subscript n
denotes the n-th approximation, and \( \tilde{y}_n \) is a restricted variation., i.e., \( \delta\tilde{y}_n = 0 . \) We start our exposition with the linear case:
According to the VIM, the basic character of the method is to construct a correction functional for the
equation, which reads
\[
y_{n+1} (x) = y_n (x) + \int_0^x \lambda (s) \left\{ y'_n (s) + p(s)\, \tilde{y}_n (s) - g(s)\right\} {\text d}s , \qquad n=0,1,2,\ldots .
\]
Here λ(s,x) is so called a general Lagrange multiplier, which can be identified optimally via
variational theory, and \( \tilde{y}_n \) denotes a restricted variation, that is, \( \delta\tilde{y}_n =0. \) Having λ obtained, an iteration formula should be used for the determination of the successive approximations yn+1(t) of the solution y(t). The initial approximation y0(t) can be arbitrary function; however, it is usually selected based on the initial conditions. Consequently, the solution is given by
\[
y(x) = \lim_{n\to\infty}\,y_n (x) .
\]
The main problem for obtaining highly accurate solutions with the VIM is the determination of the Lagrange multiplier, and there are known many forms of them. This parameter plays the important role in the speed of convergence of the VIM solution. Finding the Lagrange multiplier could be achieved by making the correction functional stationary. Taking variation with respect to the variable yn, noticing δyn(0)=0, we get
Originally, Ji-Huan He did not consider the linear part as a restricted variation and applied it only to nonlinear terms. Furthermore, the lesser the application of restricted variations the faster the approximations converging to its exact solution. In this case, he obtained (using integration by parts) the following equations for λ determination:
\[
\begin{split}
-\lambda ' (s) + p(s)\,\lambda (s) &=0 , \\
1 + \left. \lambda (s) \right\vert_{s=t} &= 0.
\end{split}
\]
In both approaches, there are repeated calculations in each step (similar to Picard's method); to cancel some of the repeated calculations, the iteration formula can be handled as follows.
Using the identity \( y_{n} = y_0 - \int_0^x \left\{ p(s)\,y_{n-1} (s) - g(s) \right\} {\text d}s , \) we obtain so called the modified variational iteration formula:
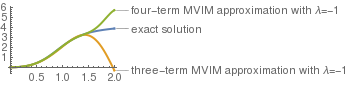
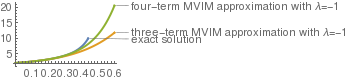
Next we demonstrate the MVIM, which leads to the recurrence:
\[
u_{n+1} = u_n - \int_0^x \left[ e^s \left( u_n (s) - u_{n-1} (s) \right) + e^{-s} \left( u_n^3 (s) - u_{n-1}^3 (s) \right) \right] {\text d}s , \qquad n=1,2,\ldots .
\]
With \( u_{-1} =0 , \ u_0 =1 , \) we obtain
\begin{eqnarray*}
u_1 (x) &=& 1 - \int_0^x \left[ e^s u_0 (s) + e^{-s} u_0^3 (s) - \cosh s \right] {\text d}s = 1- e^x + \cosh x =1-x - \frac{x^3}{6} - \frac{x^5}{120} - \cdots ,
\\
u_2 (x) &=& u_1 - \int_0^x \left[ e^s \left( u_1 (s) - u_0 (s) \right) + e^{-s} \left( u_1^3 (s) - u_0^3 (s) \right) \right] {\text d}s = y_2 (x) ,
\end{eqnarray*}
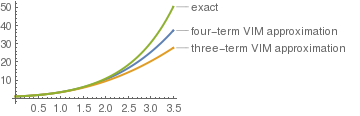
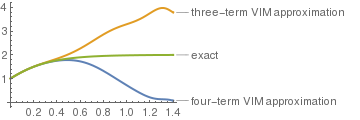
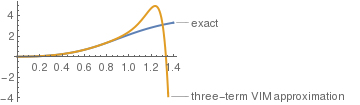
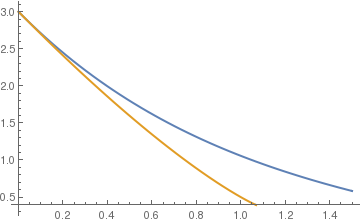
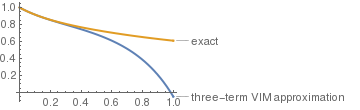
and so on. As we see from the above formulas, we obtain exactly the same sequence of functions, but we performed less calculations. Now we plot the third approximation along with the true solution.
Inan Ates and Ahmet Yildirim, "Comparison between variational iteration method and homotopy perturbation method for linear and nonlinear partial differential equations with the nonhomogeneous initial conditions," Numerical Methods for Partial Differential Equations, 2010, Vol 26, Issue 6, pp. 1581--1593, doi: https://doi.org/10.1002/num.20511
Ganji D.D. and Sadighi A. (2006) Application of He’s methods to
nonlinear coupled systems of reactions. International Journal of Nonlinear Sciences and Numerical Simulation, 2006, Vol, 7, No 4, pp. 411--418.
Ganji DD, Tari H, Jooybari MB (2007) Variational iteration
method and homotopy perturbation method for evolution equations. Comput Math Appl 54:1018–1027
Ji-Huan He, "Variational iteration method---a kind of non-linear analytical technique: some examples," International Journal of Non-Linear Mechanics, 1999, Vol 34, 699--708.
Ji-Huan He, "Variational iteration method for autonomous ordinary differential systems," Applied Mathematics and Computation, 2000, Vol. 114, 115--123.
S. S. Samaee, O. Yazdanpanah, and D. D. Ganji, "New approaches to identification of the Lagrange multiplier in the variational iteration method," Journal of the Brazilian Society of
Mechanical Sciences and Engineering, 2914, doi: 0.1007/s40430-014-0214-3
Tatari M, Dehghan M (2007), "He’s variational iteration method
for computing a control parameter in a semi-linear inverse
parabolic equation," Chaos, Solitons & Fractals, 2007, Vol. 33, Issue 2, pp. 671--677.
Tari H., Ganji D.D., and Babazadeh H. (2007) "The application of He’s
variational iteration method to nonlinear equations arising in heat
transfer," Physics Letters A, Vol. 363, No. 3, pp. 213--217, doi: 10.1016/j.physleta.2006.11.005
Tari H, Ganji D.D., and Rostamian M. (2007) "Approximate solution of
K (2, 2), KdV and modified KdV equations by variational iteration method, homotopy perturbation method and homotopy analysis method," International Journal of Nonlinear Sciences and Numerical Simulation, 2007, Vol. 8, pp.203--210.
A.-M. Wazwaz (2009), "The variational iteration method for analytic treatment for linear and nonlinear ODEs," Applied
Mathemathics and Computation, 2009, Vol. 212, Issue 1, pp. 120--143.
A.-M. Wazwaz (2006), "A study on linear and nonlinear Schrodinger
equations by the variational iteration method," Chaos Solitons
Fractals, doi: 10.1016/j.chaos.10.009
A.-M. Wazwaz (2007), The variational iteration method for the
exact solution of Laplace equation, Physics Letters A, Vol. 363, No 4, pp. 260--262, doi: 10.1016/j.physleta.2006.11.014
A.-M. Wazwaz (2001) The numerical solution of fifth-order
boundary value problems by the decomposition method. Journal of Applied Mathematics and Computing, 136:259–270
Return to Mathematica page
Return to the main page (APMA0330)
Return to the Part 1 (Plotting)
Return to the Part 2 (First Order ODEs)
Return to the Part 3 (Numerical Methods)
Return to the Part 4 (Second and Higher Order ODEs)
Return to the Part 5 (Series and Recurrences)
Return to the Part 6 (Laplace Transform)
Return to the Part 7 (Boundary Value Problems)