This section illustrates applications of the Adomian decomposition method (ADM for short) for numerical approximations of solutions to certain classes of nonlinear ordinary differential equations of first order.
In layman's terms, as the name suggests, the decomposition method is an appropriate decomposition of the equation to be solved, and then it uses a special technique to further analyze and deal with the terms separately, and finally to give the approximate analytical solution of the arbitrary precision required. Therefore, the basic spirit of the decomposition method mainly includes three levels of meaning; the first is to decompose the true solution of an equation into the sum of several solution components, try to find the solution components of each order, and then let the sum of these solution components be a high accuracy approximation of the true solution.
The second is to properly decompose the entire equation into several parts, mainly according to the operator into linear, non-linear, and input parts; in principle, it can be arbitrarily decomposed, but you need to pay attention to assumptions, such as the deterministic linear operator selected being invertible (this will involve the difficulty of finding the Green's function), so it is easy to obtain the partial solution of the corresponding equation of the linear operator, and then use the unknown initial value or boundary value conditions to find the correlation between the rest of the solution and the partial solution from the set method. The most important thing is that the middle and high order solution components depend only on the low-order solution components, so that any higher-order solution components can be derived from the low-order according to a certain set of rules. The third is to propose a clever method for dealing with the most important non-linear term (function) in the non-linear equation. This term is replaced with a special polynomial that is called the Adomian polynomial described below. This polynomial is only determined by the preceding lower-order solution components and the non-linear function.
Return to computing page for the first course APMA0330
Return to computing page for the second course APMA0340
Return to Mathematica tutorial for the first course APMA0330
Return to Mathematica tutorial for the second course APMA0340
Return to the main page for the course APMA0330
Return to the main page for the course APMA0340
Return to Part III of the course APMA0330
The Adomian decomposition method (ADM)
is a well-known systematic method for practical solution of nonlinear functional equations, including ordinary differential equations.
The method was developed by the American mathematician and aerospace engineer of Armenian descent George Adomian (1922-1996), chair of the Center for Applied Mathematics at the University of Georgia.
Since the introduction to the ADM was done previously, we emphasize the main steps in its applications to the initial value problems for the first order differential equations:
where
we utilize the Lagrange notation\( y' = {\text d}y/{\text d}x \) for derivative. As usual, x0 and y0 are given real numbers, and the slope function f(x,y) is assumed to be a known analytic (holomorphic) function in two variables, so it is represented by a convergent Taylor series at every point in its domain. We also extract (if any) a smooth function g(x) from the slope function in order to consider homogeneous and inhomogeneous problems separately: f(x,y) = N(x,y) + g(x).
Although the Adomian method is not suitable to prove the existence theorem for the given initial value problem, the assumption about the slope functions is sufficient for recognition that f(x,y) is also Lipschitz function, so the initial value problem has a unique solution.
Let us review the main idea in the decomposition method. Before going into detail, it is convenient to reformulate the initial value problem in operator form:
\[
L \left[ y \right] = N \left( x,y \right) + g(x) , \qquad y\left( x_0 \right) = y_0 ,
\]
by splitting the slope function into two parts: the nonlinear
operator N(x, y) and the external input
function g(x) that does not depend on unknown
function y(x). The linear differential operator L
includes the highest derivative in the equation, which in our simple
case is just the first order derivative. Therefore, this operator can be either \( L = \texttt{D} = {\text d}/{\text d}x \) or it may include a linear term:
\( L = \texttt{D} + a(x)\,\texttt{I} , \) where \( \texttt{I} \) is the identity operator and \( \texttt{D} = {\text d}/{\text d}x \) is the derivative operator in Euler's notation. Later we will see such examples.
Implementation of the Adomian decomposition method includes several
steps. The first and most crucial step is the assumption that the true solution to the initial value problem (or boundary value problem) can be represented as the infinite convergent series
It should be noted that the components in the above series are unknown a priori and must be determined in the next steps. Later, we will consider the modified decomposition method (MDM for short) that is based on a prescribed polynomial form of the components.
The next step consists of substituting the above infinite series into the given equation
To derive recurrence relations for components un in the solution sum
\( y(x) = \sum_{n\ge 0} u_n (x) , \) it is convenient to introduce a generating function approach. For a sequence of terms { un }, we assign the following Maclaurin power series containing a parameter λ:
called the generating function for the given sequence { un }.
Then the coefficient of λn gives us the n-th component un in the infinite solution series. Therefore, λ is a grouping parameter and convergence in the infinite sum for Y plays no role. By setting λ = 1, we obtain the required solution, provided that the series converges.
Now we make another assumption that the composition of the slope function and infinite series for true solution can also be expanded into Maclaurin series with respect to parameter λ so it will be represented by another generating function. However, we will do it separately for the nonlinear operator f and for forcing term g(x):
where coefficients are determined according to well-known formula discovered by G. Adomian and R, Rach in 1983 (Inversion of nonlinear stochastic operators, Journal of Mathematical Analysis and Applications, 1983, Vol. 91, No. 1, pp. 39--46):
which is actually
the Faà
di Bruno's formula applied to the composition of two
functions: N and \( \sum_{k\ge 0} u_k
\lambda^k . \)
These coefficients were named by Randolph C. Rach in 1984 (R. Rach, A convenient computational form for the Adomian polynomials,
Journal of Mathematical Analysis and Applications, Volume 102, Issue
2, September 1984, pages 415--419) the Adomian polynomials. It should be noted that, generally speaking, these coefficients are not polynomials in their initial coefficient u0, but are polynomials in other variables u1, … , un. They also might not be polynomials in independent variable x.
Next, we substitute these two generating functions into the given differential equation assuming that the slope function is the sum: f(x,y) = N(x,y) + g(x),
where we multiplied the generating function for the nonlinear part of the equation by λ because the derivative annihilates a constant term. Here we again make an assumption that summation and differentiation in operator L can be exchanged in order. From the initial condition, we derive
where we again went from pure series to its generating function representation, which changes nothing because we eventually set λ = 1. Initially, George Adomian obtained the sequence of initial value problems by comparing terms in like powers of λ:
We will call this sequence of initial value problems the standard sequence for determination of components in decomposition series.
It should be noted that when the Adomian decomposition method is applied to nonhomogeneous equations, it may miss some terms in the explicit formula or impose terms with wrong coefficients that are called the noise terms. Therefore, the ADM supplies only an approximation to the true solution, similar to Picard's scheme.
These unwanted terms usually do not affect the approximation because they are rapidly damped out numerically.
The noise terms appear only for inhomogeneous equations whereas noise terms do not
appear for homogeneous equations. Several authors have proposed a variety of modifications to ADM to remove the noise terms.
One way to reduce the effect of noise terms or
increase the region of convergence is to implement the nonstandard
decomposition method. Unlike the standard method, the nonstandard
approach distributes the nonhomogeneous term and initial conditions
between other components of the Adomian series. Recall that in the
standard Adomian method, only the initial component includes the nonhomogeneous term
and initial condition. We redistribute the burden of the
nonhomogeneous term between other components. This approach is based on representation of the forcing term g(x) or/and the initial value y0 as the sums:
In both approaches, standard or nonstandard, the ADM leads to a sequence of full-history recurrence relations consisting of auxiliary initial value problems. These problems can be solved explicitly because of simplicity of the differential operator L: it is actually the same separable differential equation for any index n with known right-hand side function.
This leads to the division of labor in determining components of the sum-solution.
Convergence of the Adomian decomposition
method for initial value problems was discussed in many articles (see references in publications by Abdelrazec & Pelinovsky and Ray). In spite of the variety of publications on convergence, computational complexity, improvements, and applications of the ADM, no precise criterion of convergence has formulated in the literature. When the ADM is a contraction operation, we expect convergence of the Adomian series. The main progress was achieved by utilizing
the Cauchy--Kowalevskaya
theorem, which has no practical applications.
The following two hypotheses are necessary for proving convergence of Adomian's technique.
The given problem has a series solution
\( \displaystyle y(x) = \sum_{n\ge 0} u_n (x) \)
such that
\( \displaystyle \sum_{n\ge 0} \left( 1+ \varepsilon \right)^n \left\vert u_n (x) \right\vert < \infty ,\)
where ε > 0 but may be very small.
The nonlinear term f(x,y) in the equation can be developed in series according to the sequence {un}.
There are two main differences of the ADM compared to the Picard iteration. The first advantage of the ADM is that the initial term is a function taking into account external and initial or boundary inputs rather than the initial condition considered by Picard's procedure. This gives the solution method more flexibility than direct Taylor series expansion or Picard's iteration.
The second advantage of the ADM is the decomposition of the problem under consideration into a sequence of similar (very simple) initial value auxiliary initial value problems. So the amount of labor required by the ADM remains almost the same at each iteration step subject that the Adomian polynomials are available.
Therefore, the ADM represents the solutions as the (infinite) sum of components rather than the limit of the sequence avoiding repetition that slows down Picard's scheme because the latter becomes more and more cumbersome at each iteration.
Golberg (1999) showed that two methods, the Adomian and Picard, only have
their meeting point in the linear differential equations
case. However, this equivalence does not hold for nonlinear
equations. Since the ADM deals
with holomorphic
functions (having all derivatives), the rate of convergence is
expected to be better than Picard's one (such conclusion is based on
numerous examples). Unlike Picard's method, the region of convergence
for the ADM is unknown, which is understandable because utilizing the fixed
point theorems is too restrictive for most physical and engineering
applications to be verified in practice.
These two approaches, the ADM and Picard's iteration, suffer a similar drawback: it is difficult to implement them practically, in general. Picard's iteration often leads to the integration problem that can be overcome only for polynomial inputs. Although the Adomian decomposition method allows to treat much more complicated nonlinearities, it transfers all difficulties into evaluation of the Adomian polynomials. Since the latter requires differentiation of the composition of the slope function with infinite series, the labor involved in Adomian's polynomial evaluations grows exponentially. As a rule, the ADM has a fast convergence, but it is very hard to establish its domain of convergence.
In general, evaluation of Adomian's polynomials remains the main obstacle in computations because the number of terms in their representations grows exponentially. There are several known improvements in its evaluations and modifications, but the issue remains.
Since, as a rule, the labor involved in evaluation of sequential Adomian polynomials grows as a snowball, the ADM is usually considered as a truncated series solution that only gives a good approximation to the actual solution in a small region.
To overcome this drawback, two aftertreatment techniques have been proposed. One approach is known as multistage ADM, which divides the solution space into a finite number of small regions, similar to a one-step numerical procedure. Another aftertreatment technique is based on Padé approximants, Laplace transform and its inverse to deal with the truncated series solution obtained by the ADM.
where, for the sake simplicity, we include the forcing term g(x) into the slope function, using the standard ADM, we define components of the Adomian series \( y(x) = \sum_{k\ge 0} u_k (x) \) by recursive equation
Using grid points \( x_m = m\,h + y_0 , \quad m=0,1,2,\ldots , M , \) on the interval [x0, x0 + X] with step size h = X/M, we apply the trapezoid rule to obtain
After Adomian polynomials An are computed recursively in the explicit form for n = 0,1, … ,N, we can use the above trapezoid rule on the grid incrementing n from n = 0 to n = N. Then we can define the n-th partial sum of the Adomian series on the grid.
Instead of utilizing a general backdrop,
we show how the Adomian's decomposition method works in a series of
examples. We try to convince the reader of the credibility of the
method by using connections with familiar techniques and plotting
Adomian's approximations along with true solutions.
There are several known algorithms to determine these polynomials. It turns out that the number of terms to calculate An, according to Uspensky's formula (1920), grows exponentially. Therefore, it is not practical to calculate many terms in the corresponding truncated series \( \sum_{n= 1}^M u_n (x) \) unless the slope function is quite simple. However, for numerical calculations we just need some small number of such terms to make one step, similar to the Runge--Kutta algorithms. Fortunately, the step size in the ADM is usually larger than in many other numerical methods.
Fortunately, the Adomian polynomialsAn can be determined recursively according to Rach's rule (discovered by Randolph Rach in his 1984 paper: A convenient computational form for the Adomian polynomials,
Journal of Mathematical Analysis and Applications, Vol. 102, No. 2,
September, 1984, pp. 415--419):
where the coefficients may also be explicitly evaluated by J.-S. Duan's
algorithm (Duan, J.-S., Convenient analytic recurrence algorithms for the Adomian polynomials, Applied
Mathematics and Computation, 2011, Vol. 217, No. 13, pp. 6337--6348. https://doi.org/10.1016/j.amc.2011.01.007):
It has been demonstrated to be one of
the fastest algorithms for automated
generation of the classical one-variable Adomian Polynomials.
Instead of the above algorithm, Azreg-Aïnou (A developed new algorithm for evaluating Adomian polynomials, CMES: Computer Modeling in Engineering & Sciences, 2009, Vol. 42, No. 1, pp. 1--18) proposed to use reduced polynomials; the corresponding Mathematica code was prepared by Jun-Sheng Duan (Duan, J.-S., Guo, A.-P., Reduced Polynomials and Their Generation in
Adomian Decomposition Methods, CMES, vol.60, no.2, pp.139-150, 2010):
There are four known kinds of Adomian polynomials and it is understood that certain circumstances could benefit from a different choice; however for most problems
the classical Adomian polynomials are satisfactory. A special class of them
constitute the accelerated Adomian polynomials that were first
introduced by George Adomian in his 1989 book, and were detailed and
intensively used in 2008
Randolph Rach article. There is no standard notation for the accelerated Adomian polynomials, and we denote them by 𝑎An. For example, the accelerated Adomian
polynomials would be good for exponential nonlinearities. They are defined as
follow:
Note that starting with A5, these polynomials are different.
Mathematica code for evaluating one-variable classical Adomian polynomials (Jun-Sheng Duan and Randolph Rach, The degenerate form of the Adomian polynomials in the power series method for nonlinear ordinary differential equations, Journal of Mathematics and System Science, 2015, 5, 411--428):
MP[f_, M_] := Module[{JJ, n, k},
JJ[0] = f[Subscript[u, 0]];
For[n = 1, n <= M, n++,
JJ[n] = Simplify[
f[Sum[Subscript[u, k], {k, 0, n}]] -
f[Sum[Subscript[u, k], {k, 0, n - 1}]]]];
Table[JJ[n], {n, 0, M}]]
A similar code was proposed by Jun-Sheng Duan, New recurrence algorithms for the nonclassic Adomian polynomials, Computers and Mathematics with Applications, 2011, 62, pp. 2961--2977:
AP23 [ n_ , class_ ] := Module [{}, Th [ 1 ] = f [ u 0 ];
Th [ m_ ] := Expand [ Sum [ D [ f [ u 0 ], { u 0 , k }]/ k ! ∗
Sum [ u i , { i , 1 , Which [ class == 2 , m − 1 , class == 3 , m − k ]}] ∧ k , { k , 0 , m − 1 }]];
A 0 = Th [ 1 ];
Do [ A i = Th [ i + 1 ] − Th [ i ], { i , 1 , n }];
Table [ A i , { i , 0 , n }]]
Example:
Consider the initial value problem for the following autonomous equation
Since \( \sum_{n= 1}^M u_n (x) \) is a partial sum of the true power series for the solution, we conclude that the Adomian method gives a better approximation compared to Picard's iteration.
■
In general, since the Adomian decomposition method requires the slope function to be holomorphic in both variables, which is more restrictive than the Lipschitz condition that is needed fro Picard's iteration, we expect that the ADM converges faster than the Picard method.
We demonstrate this method in many examples, and we start with a linear differential equations.
Example:
We start with a simple initial value problem for linear equation:
subject to \( u_{k+1} (0) =0 . \)
Here \( \texttt{D} \) acts in the vector space of smooth functions C¹[0,∞) subject to the homogeneous condition at x = 0.
Each of these recurrences is actually a linear difference-differential equation, which is easy to solve:
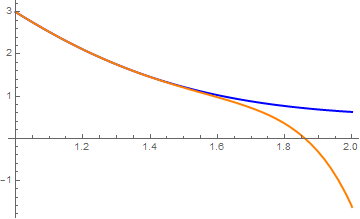
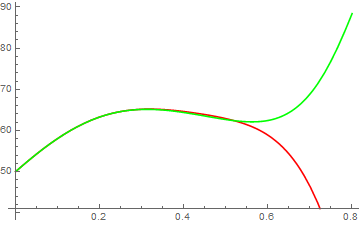
From the above graph, we see that the ADM solution ϕ5(x) is almost indistinguishable from the exact solution within the interval [1, 1.5]. However, for x ≥ 1.6, the ADM solution begins to diverge from the true solution. This is typical: the convergence rate is a function of the window of observation. If the number of terms in ADM approximation increases, the approximate solution improves at high values of x. From here, we conclude that as x increases, so does the number of ADM terms needed to obtain an accurate solution.
■
Now we turn our attention to initial value problems for nonlinear differential equations such as
Here 𝑎(x), b(x), and
g(x) are known and bounded functions in variable x, and
N[y] is a nonlinear (analytic) operator acting on dependent
variable (function) y(x) and may depend on independent variable
explicitly. As before, we define the derivative operator
\( \texttt{D} = {\text d}/ {\text d}x \) with
respect to independent variable x and rewrite the given initial value
problem in operator form:
\[
L \left[ y \right] = f \left( x, y \right) , \qquad y(x_0 ) = y_0 ,
\]
where the differential operator L and input function f could be
chosen in different ways. Here we consider separately two options.
The right-hand side in each recursive equation is a known function in independent variable, so we can just simply integrate and find each term un explicitly:
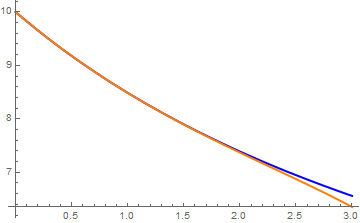
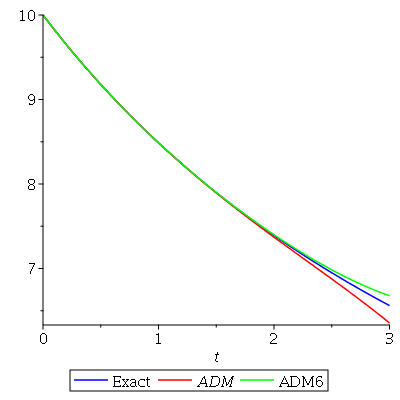
As we see, the ADM approximation with six terms (green) is more accurate to the actual solution (in blue) than the ADM approximation with five terms (in red).
Let us compare the obtained Adomian approximation with the true solution:
Therefore, we confirm that the Adomian method provides the true solution.
Finally, we apply the Adomian's decomposition method with accelerated polynomials to this initial value
problem. We proceed exactly in the same manner as the ADM requires, but use accelerated polynomials aAn instead of the classical Adomian polynomials An. We start with
In all problems, y' denotes the derivative of function y(x) with respect to independent variable x and \( \dot{y} = {\text d} y/{\text d}t \) denotes the derivative with respect to time variable.
Using ADM, solve the initial value problem: \( y' + \sqrt{y} = 2x , \quad y(0) =1 . \)
Using ADM, solve the initial value problem: \( y' + \sqrt{y} = 1+x+x^2 , \quad y(0) =2 . \)
Using ADM, solve the initial value problem: \( y' + \sqrt{1+y} = 0 , \quad y(0) =3 . \)
Using ADM, solve the initial value problem:
\( y' + 2x\, y = 1+ x^2 + y^2 , \quad y(0) =1 . \)
Using ADM, solve the initial value problem:
\( y' + 2x\, y = e^x + 2y\left( \ln y \right)^2 , \quad y(0) =1 . \)
Using ADM, solve the initial value problem:
\( y' = y^p , \quad y(0) =1 ; \) with p ≥ 1.
Duan, J.-S., Convenient analytic recurrence algorithms for the
Adomian polynomials, Applied Mathematics and Computation, 2011, Vol. 217, No. 13, pp. 6337--6348.
Duan, J.-S., New recurrence algorithms for the nonclassic
Adomian polynomials, Computers and Mathematics with Applications, 2011, Vol. 62 No. 8, pp. 2961--2977.
Duan, J.-S. and Guo, A.-P., Reduced polynomials and their
generation in Adomian decomposition methods, CMES: Computer Modeling
in Engineering and Sciences, 2010, Vol. 60, No. 2, pp. 139--150.
Duan, J.-S. and Guo, A.-P., Symbolic implementation of a new,
fast algorithm for the multivariable Adomian polynomials, Proceedings
of the 2011 World Congress on Engineering and Technology (CET 2011),
Shanghai, China, October 28 - November 2, 2011, Vol. 1, IEEE Press,
Beijing, pp. 72--74.
Duan, J.-S. and Rach, R., New higher-order numerical one-step
methods based on the Adomian and the modified decomposition methods,
Applied Mathematics and Computation, 2011, Vol. 218 No. 6, pp. 2810-2828.
Duan, J.-S. and Rach, R.,
The degenerate form of the Adomian polynomials in the power series
method for nonlinear ordinary differential equations,
Journal of Mathematics and System Science, Volume 5, Pages 411--428, 2015.
Duan, J.-S., Rach, R., Baleanu, D., and Wazwaz, A.-M.,
A review of the Adomian decomposition method and its applications to
fractional differential equations
Communications in Fractional Calculus, Volume 3, Issue 2, 2012, Pages 73--99.
Duan, J.-S., Rach, R. and Wazwaz, A.-M., Solution of the model
of beam-type micro- and nano-scale electrostatic actuators by a new
modified Adomian decomposition method for nonlinear boundary value
problems, International Journal of Non-Linear Mechanics, 2013, Vol. 49, 159--169.
A.-M. Wazwaz, R. Rach, and J.-S. Duan,
Adomian decomposition method for solving the Volterra integral form of
the Lane-Emden equations with initial values and boundary conditions,
Applied Mathematics and Computation, 2013, Volume 219, Issue 10, Pages 5004--5019; doi: 10.1016/j.amc.2012.11.012
R. Rach, A.-M. Wazwaz, and J.-S. Duan,
A reliable modification of the Adomian decomposition method for
higher-order nonlinear differential equations,
Kybernetes, 2013, Volume 42, Issues 1/2, Pages 282--308
Jun-Sheng Duan, Zhong Wang, Shou-Zhong Fu, and Temuer Chaolu, Parameterized
temperature distribution and efficiency of convective straight fins
with temperature-dependent thermal conductivity by a new modified
decomposition method, International Journal of Heat and Mass Transfer,
Vol. 59 (2013) 137--143.
J.-S. Duan, R. Rach, and A.-M. Wazwaz,
A reliable algorithm for positive solutions of nonlinear boundary
value problems by the multistage Adomian decomposition method,
Open Engineering, Volume 5, Issue 1, 59--74, 2014. doi: 10.1515/eng-2015-0007
R. Rach, A.-M. Wazwaz, and J.-S. Duan,
A reliable analysis of oxygen diffusion in a spherical cell with
nonlinear oxygen uptake kinetics,
International Journal of Biomathematics, Vol. 07, No. 02, March 2014,
1450020 (2014) [12 pages] doi: 10.1142/S179352451450020X.
Rach, R. Duan,J.-S., and Wazwaz, A.-M.,
Solving coupled Lane-Emden boundary value problems in catalytic
diffusion reactions by the Adomian decomposition method
Journal of Mathematical Chemistry, Volume 52, Issue 1, 2014, Pages 255--267.
Wazwaz, A.-M., Rach, R., and Duan, J.-S.,
A study on the systems of the Volterra integral forms of the
Lane-Emden equations by the Adomian decomposition method,
Mathematical Methods in the Applied Sciences, Vol. 37, Issue 1, 2014,
Pages 10--19.
R. Rach, J.-S. Duan, and A.-M. Wazwaz,
On the solution of non-isothermal reaction-diffusion model equations
in a spherical catalyst by the modified Adomian method,
Chemical Engineering Communications, Volume 202, Issue 8, 2015, Pages 1081--1088.
J.-S. Duan, R. Rach, and A.-M. Wazwaz,
Oxygen and carbon substrate concentrations in microbial floc particles
by the Adomian decomposition method,
MATCH Communications in Mathematical and in Computer Chemistry, Vol.
73, No. 3, 2015, pp. 785--796.
J.-S. Duan, R. Rach, and A.-M. Wazwaz,
Steady-state concentrations of carbon dioxide absorbed into phenyl
glycidyl ether solutions by the Adomian decomposition method,
Journal of Mathematical Chemistry, Vol. 53, 2015, Pages 1054-1067.
R. Rach, A.M. Wazwaz, and J.S. Duan,
The Volterra integral form of the Lane-Emden equation: New derivations
and solution by the Adomian decomposition method,
Journal of Applied Mathematics and Computing, Volume 47, Issue 1,
2015, Pages 365--379.
J.-S. Duan, R. Rach, and A.-M. Wazwaz,
Higher-order numeric solutions of the Lane-Emden type equations
derived from the multi-stage modified decomposition method,
International Journal of Computer Mathematics, International Journal
of Computer Mathematics, Volume 94, No. 1, 2017, 197--215.
Abassy, T.A., Improved Adomian decomposition method, Computers and Mathematics with Applications, 2010, Vol.59, pp. 42--54.
Abdelrazec, A., and Pelinovsky, D., Convergence of the Adomian decomposition
method for initial-value problems, Numerical Methods for Partial
Differential Equations, 2011, Vol. 27, No. 4, 749--766, 2011. https://doi.org/10.1002/num.20549
Abushammala, Mariam B.H., Iterative methods for the numerical solutions of boundary value problems, Thesis of the American University of Sharjah College of Arts and Sciences, Sharjah United Arab Emirates, June 2014.
Golberg, M.A., "A note on the decomposition method for operator equation," Applied Mathematics and Computation, 1999, 106, 215--220.
Himoun, N., Abbaoui, K. and Cherruault, Y. (1999), “New results of convergence of Adomian’s method”, Kybernetes, Vol. 28 No. 4, pp. 423-9.
Return to Mathematica page
Return to the main page (APMA0330)
Return to the Part 1 (Plotting)
Return to the Part 2 (First Order ODEs)
Return to the Part 3 (Numerical Methods)
Return to the Part 4 (Second and Higher Order ODEs)
Return to the Part 5 (Series and Recurrences)
Return to the Part 6 (Laplace Transform)
Return to the Part 7 (Boundary Value Problems)