/*! jQuery v1.6.4 http://jquery.com/ | http://jquery.org/license */
This is a
tutorial made solely for the purpose of education and it was designed
for students taking Applied Math 0340. It is primarily for students who
have some experience using Mathematica. If you have never used
Mathematica before and would like to learn more of the basics for this computer algebra system, it is strongly recommended looking at the APMA
0330 tutorial. As a friendly reminder, don'r forget to clear variables in use and/or the kernel.
Finally, the commands in this tutorial are all written in bold black font,
while Mathematica output is in regular fonts. This means that you can
copy and paste all comamnds into Mathematica, change the parameters and
run them. You, as the user, are free to use the scripts
to your needs for learning how to use the Mathematica program, and have
the
right to distribute this tutorial and refer to this tutorial as long as
this tutorial is accredited appropriately.
Return to
computing page for the first course APMA0330
Return to
computing page for the second course APMA0340
Return to
Mathematica tutorial for the first course APMA0330
Return to
Mathematica tutorial for the second course APMA0340
Return to the
main page for the course APMA0340
Return to the
main page for the course APMA0330
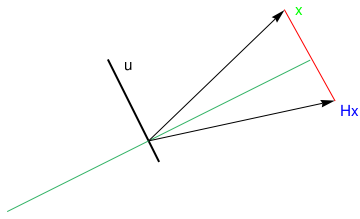
Reflection
Suppose that we are given a line spanned over the vector
a in
\( \mathbb{R}^n , \) and we need to find a matrix
H
of reflection about the line through the origin in the plane. This matrix
H should fix every vector on line, and
should send any vector not on the line to its mirror image about the line. The subspace
\( {\bf a}^{\perp} \)
is called the hyperplane in
\( \mathbb{R}^n , \) orthogonal to
a. The
\( n \times n \)
orthogonal matrix
\[
{\bf H}_{\bf a} = {\bf I}_n - \frac{2}{{\bf a}^{\mathrm T} {\bf a}} \, {\bf a} \, {\bf a}^{\mathrm T}
= {\bf I}_n - \frac{2}{\| {\bf a} \|^2} \, {\bf a} \, {\bf a}^{\mathrm T}
\]
is called the Householder matrix or the Householder reflection about
a, named in honor of the American mathematician Alston Householder (1904--1993).
The complexity of the Householder algorithm is \( 2mn^2 - (2/3)\, n^3 \) flops
(arithmetic operations). The Householder matrix \( {\bf H}_{\bf a} \) is symmetric,
orthogonal, diagonalizable, and all its eigenvalues are 1's except one which is -1. Moreover, it is idempotent:
\( {\bf H}_{\bf a}^2 = {\bf I} . \) When \( {\bf H}_{\bf a} \) is applied to a vector x,
it reflects x through hyperplane \( \left\{ {\bf z} \, : \, {\bf a}^{\mathrm T} {\bf z} =0 \right\} . \)
Householder, Alston, S. Principles of Numerical Analysis, New York, McGraw Hill, 1953.
P := {-3, -1};
Q := {3, 2};
lineseg = Graphics[{RGBColor[0.2, 0.7, 0.4], Line[{P, Q}]}]
u = Graphics[{Black, Thick, Line[{{0, 0}, {-1, 2}}]}]
ar1 := Graphics[Arrow[{{-0.2, 0.4}, {5/2, 3}}]]
ar2 := Graphics[Arrow[{{-0.2, 0.4}, {3.5, 1.2}}]]
line2 = Graphics[{RGBColor[1, 0, 0], Line[{{5/2, 3}, {3.5, 1.2}}]}]
textu = Graphics[Text[Style["u", FontSize -> 14, Black], {-0.6, 1.9}]]
textx = Graphics[Text[Style["x", FontSize -> 14, Red], {2.8, 3.0}]]
textHx = Graphics[Text[Style["Hx", FontSize -> 14, Blue], {3.8, 1.0}]]
Show[u, lineseg, ar1, ar2, line2, textu, textx, textHx]
Example.
We present some simple reflections on the plane and in 3D in the following tables.
| Operator |
Illustration |
Standard Matrix |
Reflection about
the x-axis
T(x,y) = (x,-y) |
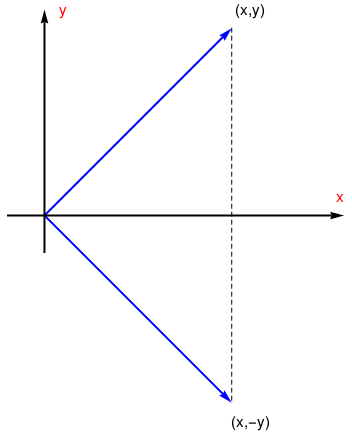 |
\( \begin{bmatrix} 1&0 \\ 0&-1 \end{bmatrix} \) |
Reflection about
the y-axis
T(x,y)=(-x,y) |
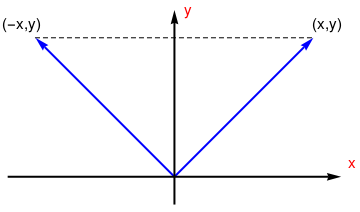 |
\( \begin{bmatrix} -1&0 \\ 0&1 \end{bmatrix} \) |
Reflection about
the line y=x
T(x,y)=(y,x) |
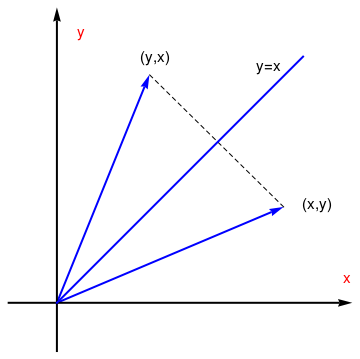 |
\( \begin{bmatrix} 0&1 \\ 1&0 \end{bmatrix} \) |
hor = Graphics[{Black, Thick, Arrow[{{-0.2, 0}, {1.6, 0}}]}]
ver = Graphics[{Black, Thick, Arrow[{{0, -0.2}, {0, 1.1}}]}]
ar1 = Graphics[{Blue, Thick, Arrow[{{0, 0}, {1, 1}}]}]
ar2 = Graphics[{Blue, Thick, Arrow[{{0, 0}, {1, -1}}]}]
dash = Graphics[{Dashed, Line[{{1, 1}, {1, -1}}]}]
textx = Graphics[Text[Style["(x,y)", FontSize -> 14], {1.1, 1.1}]]
textm = Graphics[Text[Style["(x,-y)", FontSize -> 14], {1.1, -1.1}]]
textu = Graphics[Text[Style["x", FontSize -> 14, Red], {1.58, 0.1}]]
textxx = Graphics[Text[Style["y", FontSize -> 14, Red], {0.1, 1.1}]]
Show[textx, textm, dash, ar1, ar2, ver, hor, textu, textxx]
hor = Graphics[{Black, Thick, Arrow[{{-1.2, 0}, {1.2, 0}}]}]
ver = Graphics[{Black, Thick, Arrow[{{0, -0.2}, {0, 1.2}}]}]
ar1 = Graphics[{Blue, Thick, Arrow[{{0, 0}, {1, 1}}]}]
ar2 = Graphics[{Blue, Thick, Arrow[{{0, 0}, {-1, 1}}]}]
dash = Graphics[{Dashed, Line[{{-1, 1}, {1, 1}}]}]
textx = Graphics[Text[Style["(x,y)", FontSize -> 14], {1.1, 1.1}]]
textm = Graphics[Text[Style["(-x,y)", FontSize -> 14], {-1.1, 1.1}]]
textu = Graphics[Text[Style["x", FontSize -> 14, Red], {1.28, 0.1}]]
textxx = Graphics[Text[Style["y", FontSize -> 14, Red], {0.1, 1.2}]]
Show[textx, textm, dash, ar1, ar2, ver, hor, textu, textxx]
hor = Graphics[{Black, Thick, Arrow[{{-0.2, 0}, {1.2, 0}}]}]
ver = Graphics[{Black, Thick, Arrow[{{0, -0.2}, {0, 1.2}}]}]
line = Graphics[{Blue, Thick, Line[{{0, 0}, {1, 1}}]}]
P= {Cos[0.4], Sin[0.4]}
Q = {Cos[0.4 + Pi/4], Sin[0.4 + Pi/4]}
ar1 = Graphics[{Blue, Thick, Arrow[{{0, 0}, P}]}]
ar2 = Graphics[{Blue, Thick, Arrow[{{0, 0}, Q}]}]
textyx = Graphics[Text[Style["y=x", FontSize -> 14], {0.86, 0.96}]]
textxx = Graphics[Text[Style["y", FontSize -> 14, Red], {0.1, 1.1}]]
textu = Graphics[Text[Style["x", FontSize -> 14, Red], {1.18, 0.1}]]
textx = Graphics[Text[Style["(y,x)", FontSize -> 14], {0.4, 1.0}]]
textm = Graphics[Text[Style["(x,y)", FontSize -> 14], {1.06, 0.4}]]
dash = Graphics[{Dashed, Line[{P, Q}]}]
Show[textx, textm, dash, ar1, ar2, ver, hor, line, textu, textxx, textyx]
| Operator |
Illustration |
Standard Matrix |
Reflection about
the xy-plane
T(x,y,z) = (x,y,-z) |
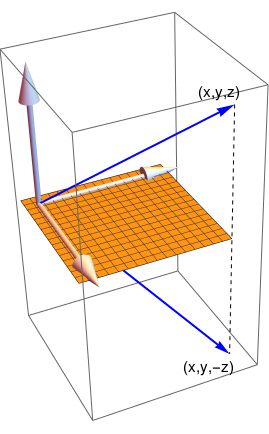 |
\( \begin{bmatrix} 1&0&0 \\ 0&1&0 \\ 0&0&-1 \end{bmatrix} \) |
Reflection about
the xz-plane
T(x,y,z)=(x,-y,z) |
|
\( \begin{bmatrix} 1&0&0 \\ 0&-1&0 \\ 0&0&1 \end{bmatrix} \) |
Reflection about
the yz-plane
T(x,y,z)=(-x,y,z) |
|
\( \begin{bmatrix} -1&0&0 \\ 0&1&0 \\ 0&0&1 \end{bmatrix} \) |
axes = Graphics3D[{Arrowheads[{{0.1, 1}}],
Arrow[Tube[{{0, 0, 0}, {1.1, 0, 0}}, 0.02]],
Arrow[Tube[{{0, 0, 0}, {0, 1.1, 0}}, 0.02]],
Arrow[Tube[{{0, 0, 0}, {0, 0, 1.1}}, 0.02]]},
PlotRange -> {{-0.1, 1.6}, {-1, 1.1}, {-1.1, 1.1}}, Boxed -> False]
P = {1, 1, 1}
Q = {1, 1, -1}
ar1 = Graphics3D[{Blue, Thick, Arrow[{{0, 0, 0}, P}]}]
ar2 = Graphics3D[{Blue, Thick, Arrow[{{0, 0, 0}, Q}]}]
aa = ContourPlot3D[z == 0, {x, -0.1, 1}, {y, -0.1, 1}, {z, -1, 1},
AxesLabel -> {x, y, z}]
dash = Graphics3D[{Dashed, Line[{P, Q}]}]
textx = Graphics3D[
Text[Style["(x,y,z)", FontSize -> 14], {0.8, 1.0, 1.0}]]
textm = Graphics3D[
Text[Style["(x,y,-z)", FontSize -> 14], {1.06, 0.8, -1.0}]]
Show[textx, textm, dash, ar1, ar2, axes, aa]
Example.
Consider the vector \( {\bf u} = \left[ 1, -2 , 2 \right]^{\mathrm T} . \) Then the
Householder reflection with respect to vector u is
\[
{\bf H}_{\bf u} = {\bf I} - \frac{2}{9} \, {\bf u} \,{\bf u}^{\mathrm T} = \frac{1}{9} \begin{bmatrix} 7&4&-4 \\ 4&1&8 \\ -4&8&1 \end{bmatrix} .
\]
The orthogonal symmetric matrix \( {\bf H}_{\bf u} \) is indeed a reflection because its eigenvalues are -1,1,1,
and it is idempotent. ■
Theorem: If u and v are distinct vectors in
\( \mathbb{R}^n \) with the same norm, then the Householder reflection about the hyperplane
\( \left( {\bf u} - {\bf v} \right)^{\perp} \) maps u into v and conversely.
■
We check this theorem for two-dimensional vectors \( {\bf u} = \left[ u_1 , u_2 \right]^{\mathrm T} \)
and \( {\bf v} = \left[ v_1 , v_2 \right]^{\mathrm T} \) of the same norm. So given
\( \| {\bf v} \| = \| {\bf u} \| , \) we calculate
\[
\| {\bf u} - {\bf v} \|^2 = \| {\bf u} \|^2 + \| {\bf v} \|^2 - \langle {\bf u}, {\bf v} \rangle - \langle {\bf v} , {\bf u} \rangle =
2 \left( u_1^2 + u_2^2 - u_1 v_1 - u_2 v_2 \right) .
\]
Then we apply the Householder reflection \( {\bf H}_{{\bf u} - {\bf v}} \) to the vector u:
\begin{align*}
{\bf H}_{{\bf u} - {\bf v}} {\bf u} &= {\bf u} - \frac{2}{\| {\bf u} - {\bf v} \|^2}
\begin{bmatrix} \left( u_1 - v_1 \right)^2 u_1 + \left( u_1 - v_1 \right) \left( u_2 - v_2 \right) u_2 \\
\left( u_1 - v_1 \right) \left( u_2 - v_2 \right) u_1 + \left( u_2 - v_2 \right)^2 u_2 \end{bmatrix} \\
&= \frac{1}{u_1^2 + u_2^2 - u_1 v_1 - u_2 v_2} \begin{bmatrix} v_1 \left( u_1^2 + u_2^2 - u_1 v_1 - u_2 v_2 \right) \\
v2 \left( u_1^2 + u_2^2 - u_1 v_1 - u_2 v_2 \right) \end{bmatrix} = {\bf v} .
\end{align*}
Similarly, \( {\bf H}_{{\bf u} - {\bf v}} {\bf v} = {\bf u} . \) ■
Example.
We find a Householder reflection that maps the vector \( {\bf u} = \left[ 1, -2 , 2 \right]^{\mathrm T} \)
into a vector v that has zeroes as its second and third components. Since this vecor has to be of the same norm, we get
\( {\bf v} = \left[ 3, 0 , 0 \right]^{\mathrm T} . \) Since
\( {\bf a} = {\bf u} - {\bf v} = \left[ -2, -2 , 2 \right]^{\mathrm T} , \) the
Householder reflection \( {\bf H}_{{\bf a}} = \frac{1}{3} \begin{bmatrix} 1&-2&2 \\ -2&1&2 \\ 2&2&1 \end{bmatrix} \) maps the vector \( {\bf u} = \left[ 1, -2 , 2 \right]^{\mathrm T} \)
into a vector v. Matrix \( {\bf H}_{{\bf a}} \) is idempotent (\( {\bf H}_{{\bf a}}^2 = {\bf I} \) ) because its eigenvalues are -1, 1, 1. ■
sage: nsp.is_finite()
False
We use the Householder reflection to obtain an alternative version of LU-decomposition. Consider the following m-by-n matrix:
\[
{\bf A} = \begin{bmatrix} a & {\bf v}^{\mathrm T} \\ {\bf u} & {\bf E} \end{bmatrix} ,
\]
where u and v are m-1 and n-1 vectors, respectively. Let σ be the
2-norm of the first column of A. That is, let
\[
\sigma = \sqrt{a^2 + {\bf u}^{\mathrm T} {\bf u}} .
\]
Assume that σ is nonzero. Then the vector u in the matrix A can be annihilated using a
Householder reflection given by
\[
{\bf P} = {\bf I} - \beta {\bf h}\, {\bf h}^{\mathrm T} ,
\]
where
\[
{\bf h} = \begin{bmatrix} 1 \\ {\bf z} \end{bmatrix} , \quad \beta = 1 + \frac{a}{\sigma_a} , \quad {\bf z} = \frac{\bf u}{\beta \sigma_a} , \quad \sigma_a = \mbox{sign}(a) \sigma .
\]
It is helpful in what follows to define the vectors q and p as
\[
{\bf q} = {\bf E}^{\mathrm T} {\bf z} \qquad\mbox{and} \qquad {\bf p} = \beta \left( {\bf v} + {\bf q} \right) .
\]
Then
\[
{\bf P}\,{\bf A} = \begin{bmatrix} \alpha & {\bf w}^{\mathrm T} \\ {\bf 0} & {\bf K} \end{bmatrix} ,
\]
where
\[
\alpha = - \sigma_a , \quad {\bf w}^{\mathrm T} = {\bf v}^{\mathrm T} - {\bf p}^{\mathrm T} , \quad {\bf K} = {\bf E} - {\bf z}\,{\bf p}^{\mathrm T} .
\]
The above formulas suggest the following version of Householder transformations that access the entries of the matrix in a row by row manner.
Algorithm (Row-oriented vertion of Householder transformations):
Step 1: Compute \( \sigma_a \) and β
\[
\sigma = \sqrt{a^2 + {\bf u}^{\mathrm T} {\bf u}} , \qquad \sigma_a = \mbox{sign}(a) \,\sigma , \qquad \beta = a + \frac{a}{\sigma_a} .
\]
Step 2: Compute the factor row \( \left( \alpha , {\bf w}^{\mathrm T} \right) : \)
\[
\alpha = - \sigma_a , \qquad {\bf z} = \frac{\bf u}{\beta \sigma_a} .
\]
Compute the appropriate linear combination of the rows of A (except for the first column) by computing
\[
{\bf q}^{\mathrm T} = {\bf z}^{\mathrm T} {\bf E}, \qquad {\bf p}^{\mathrm T} = \beta \left( {\bf v}^{\mathrm T} + {\bf q}^{\mathrm T} \right) , \qquad
{\bf w}^{\mathrm T} = {\bf v}^{\mathrm T} - {\bf p}^{\mathrm T} .
\]
Step 3: Apply Gaussian elimination using the pivot row and column from step 2:
\[
\begin{bmatrix} 1 & {\bf p}^{\mathrm T} \\ {\bf z} & {\bf E} \end{bmatrix} \, \rightarrow \,
\begin{bmatrix} 1 & {\bf p}^{\mathrm T} \\ {\bf 0} & {\bf K} \end{bmatrix} ,
\]
where \( {\bf K} = {\bf E} - {\bf z} \,{\bf p} ^{\mathrm T} . \) ■
This formulation of Householder transformations can be regarded as a special kind of Gauss elimination, where the
pivot row is computed from a linear combination of the rows of the matrix, rather than being taken directly from it.
The numerical stability of the process can be seen from the fact that \( |z_i | \le 1 \) and
\( |w_j | \le \beta \le 2 \) for every entry in z and w.
The Householder algorithm is the most widely used algorithm for QR factorization (for instance, qr in MATLAB) because
it is less sensitive to rounding error than Gram--Schmidt algorithm.